2002年4月12日公開
2002年5月13日CSSを変更
2003年1月21日Licenseを変更
2004年4月14日プロバイダ変更にともないURLなどを修正
|
|
発表の概要はPC Watchの記事にまとまっているのでそちらを読んでいただくとして、ここでは記事にはならないような細かな点を拾っておく。
その前に、右の写真は質疑応答で答えるHRPサブリーダーの東大・舘教授。左がプロジェクトリーダーの東大・井上教授で、右が産総研の比留川 研究グループ長。質疑応答では一応、製造科学技術センターの人が司会をしていたのだが、完全に井上教授が仕切ってしまっていた。最後にまとめとして舘教授がコメントを求められ、それに答えてリモートエグジスタンスやアールキューブなどの持論を述べているのがちょうどこの写真。
なお、舘教授の著書『ロボット入門(ちくま新書)』(筑摩書房)にはこの辺りが詳細に記されており、2足歩行や重機の運転、HRP-2の出渕デザインなどの目立つトピックに埋もれがちなHRPの根幹理念を知るための重要な副読本になっている。
デモンストレーションはHRP後期に行なわれる5分野の研究それぞれについて行なわれたのだが、ここでは個人的に興味深かった3分野に関してのみ扱う。
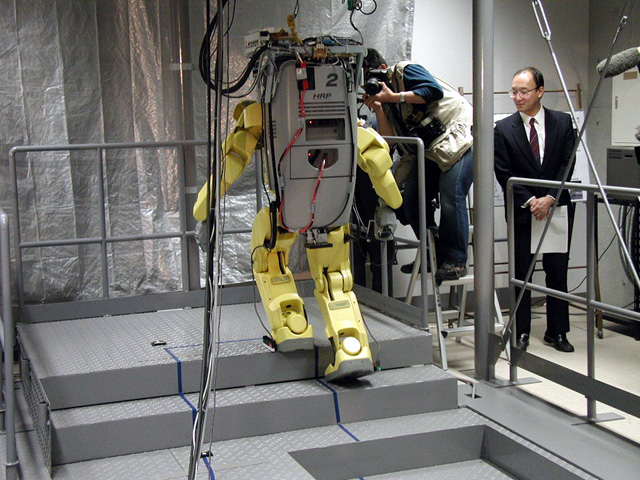
今回のデモの中でロボットがもっとも歩き回っていたのがこのプラント保守。不整地ではないが障害物競走並に関門のあるコースを自立的に歩き回っている。歩行は、踵から足と着地させるもともとのホンダのロボットの歩き方をしていた。なお、このデモ使われたHRP-1はソフト・ハードともホンダP3ベースのもので、ソフトウェアを産総研で開発したHRP-1Sは代行運転のデモに用いられている。
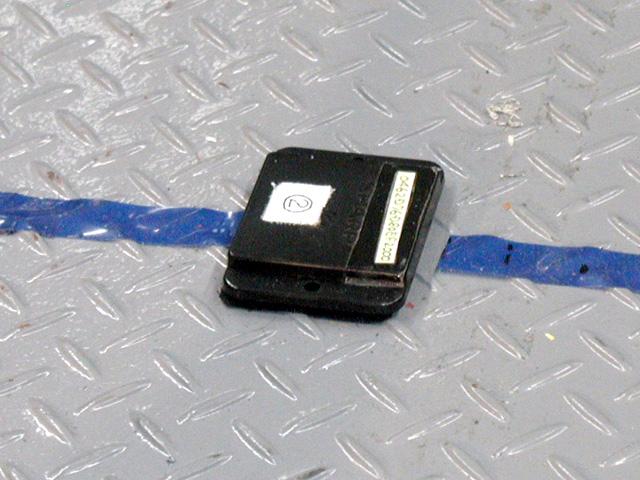
このデモでは、床に貼られているICタグを読みとることで、現在地や次の動作などを知り、自立的に行動している。ICタグは約1Kbit程度の容量を持ち、ロボット側からは読みとりだけでなく、書き換えも可能。リーダはバックパックの底の位置に取り付けられている。ICタグの大きさは目測で6〜8cm×8〜10cmの長方形で厚みは1cm前後。この程度だとHRP-1が踏んづけても何の問題もなく歩いていた。
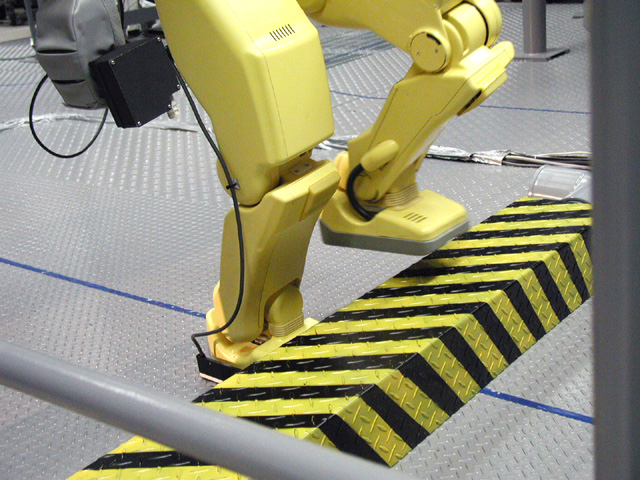
ICタグだけでは正確な位置決めをすることができないため、階段などの障害物の場所を正確に示す磁気テープが床に貼られている。足の外測部にある黒い物が磁気テープリーダ。これが両足にあり、二つのリーダがそれぞれ磁気テープを検出することで、左右と前後の正確な位置合わせが可能。床に貼ってある青いテープはルートを示すためのただのビニールテープで、磁気テープは床とほとんど同じ色のため写真では判別不能。
|
|
|
|
|
|
|
|
大きな動きがないためTV局には絵的に地味で放映で使えないと言われていたが、個人的にはもっとも興味深かったデモ。
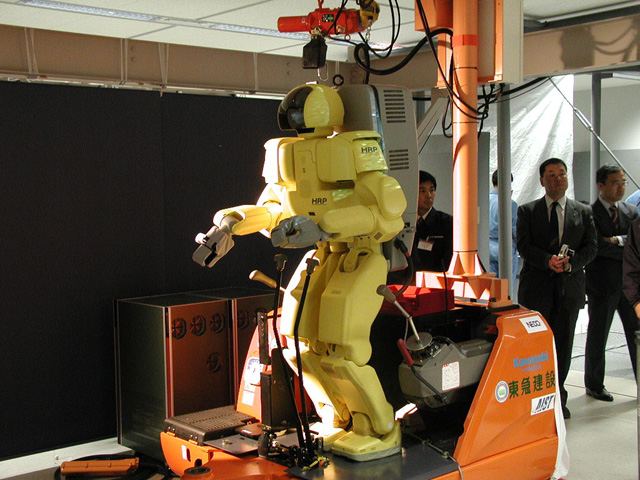
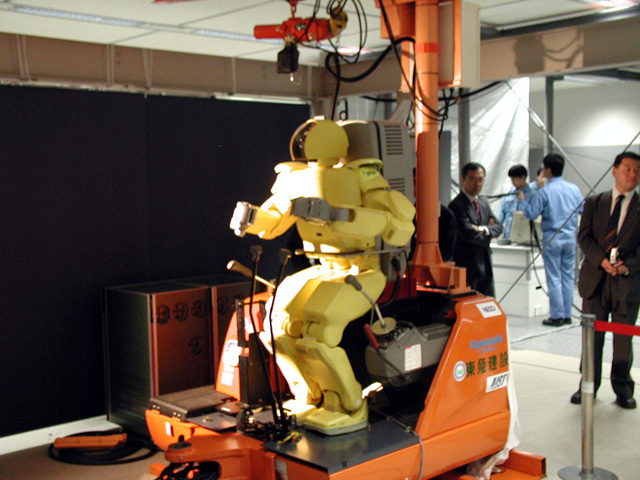
ロボットによる運転では、HRP前期に立ち乗り型のフォークリフトによるデモが行なわれており、ROBODEX 2002でも公開されたが、後期は通称バックフォーと呼ばれる大型のショベルカーを操作させるのが目標。ただし現在の所は模擬操縦席を用いての研究で、実物のショベルカーは秋以降になる。
最終的には自ら操縦席に乗り込んで着席させるところまでいきたいそうだが、今のところは模擬操縦席の上にクレーンで吊るされたまま運ばれており、座るときもおそるおそるといった感じで、かなりゆっくりと座っている。下の最初の3枚の写真がちょうどその様子だが、「よっこいしょ」いう声が聞こえてきそうである。
|
|
|
|
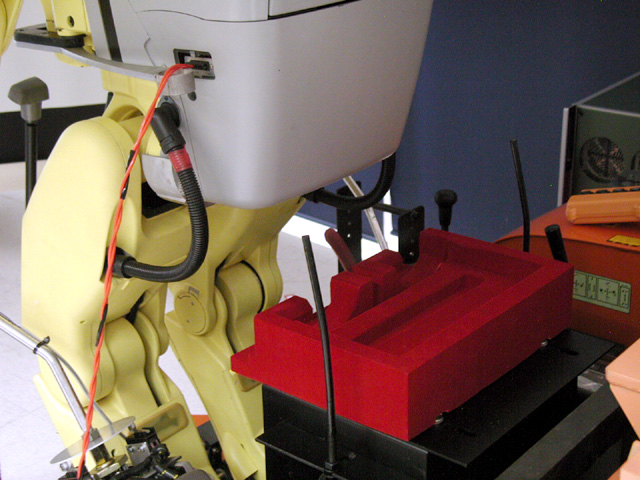
あまり知られていないが、現在ある2足歩行ロボットのほとんどが座ることができない。というよりも、座ることをまったく想定していないため、このデモではイスの部分に発泡ウレタンで作った専用のイス(というより治具)が備え付けられている。大きな写真で見るとわかるが、HRP-1Sのおしりの部分とバックパックの底部がちょうど収まるように造形されている。
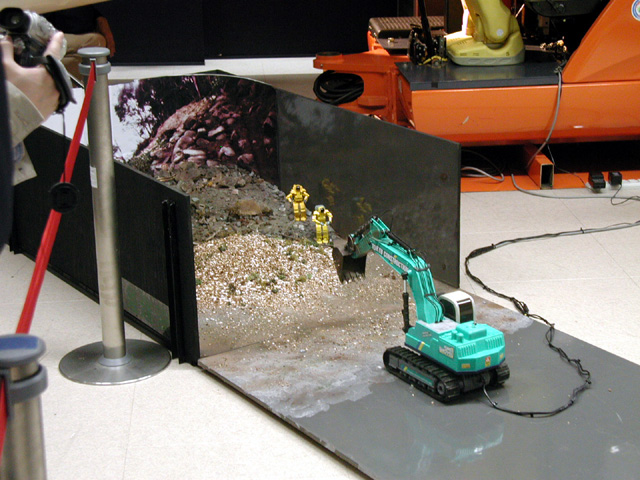
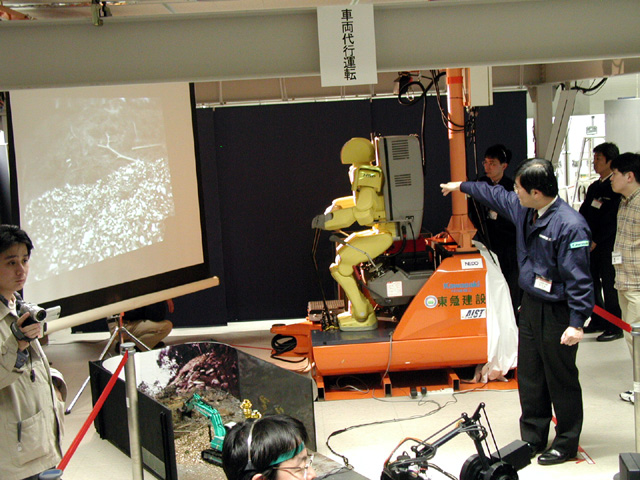
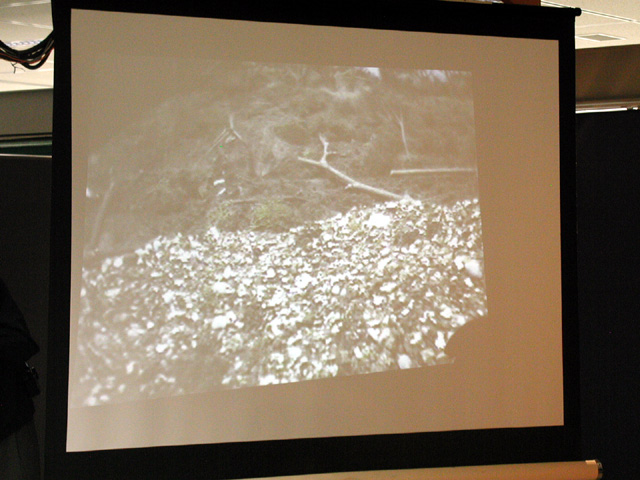
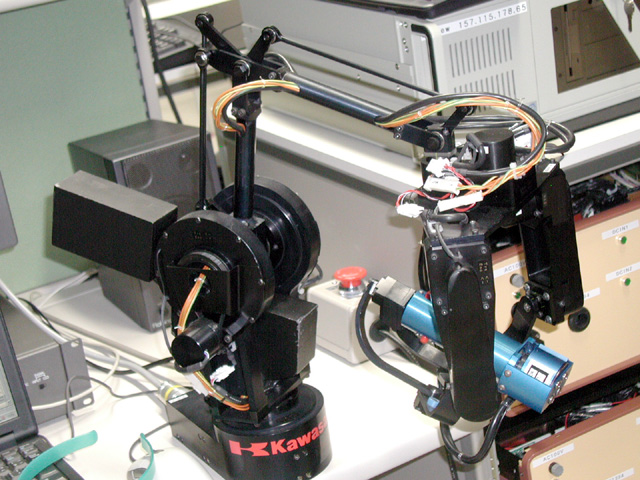
模擬操縦席は5枚目の写真に写っているラジコンのショベルカーに連動しており、さらにこのラジコンの操縦席の位置にCCDカメラが仕込まれ、運転者の視点からの映像が模擬操縦席の前に吊るされたスクリーンに投影されている。そしてHRP-1Sが見た映像を、ミニマムコックピットに座る人間が見るという、少々ややこしいことになっている。
余談だが、このラジコンとその前にある工事現場を復元したジオラマが異常に良くできており、CCDを通して見るとまるで本物の工事現場と見まごうほど。災害現場に散乱する倒木を模した小枝まであって、説明されるまではスクリーンの映像を外で撮影してきた実写だと思いこんでいた。それと、ジオラマの中にいる2機の小さなHRP-1(目算で10cm前後)もひどくできが良い。知る限りではこの大きさのホンダP3のプラモデル・フィギュアは市販されていないので、おそらく研究者の誰かによるフルスクラッチなのだろう。見ていて欲しくなった(笑)。以上、余談終わり。
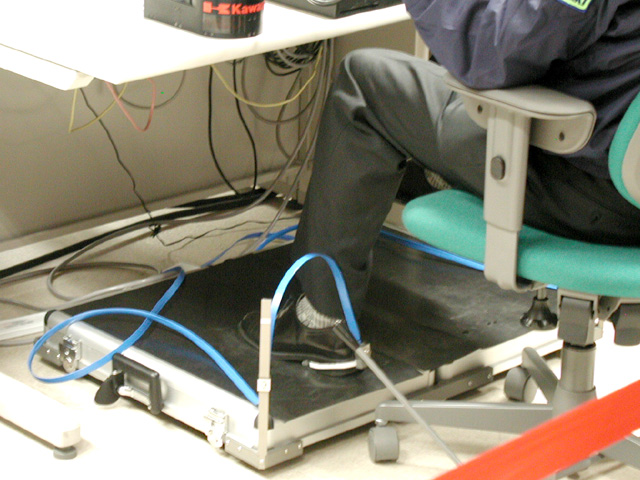
さて、ミニマムコックピットだが、前期研究で開発された半天周スクリーンを持つスーパーコックピットのサブセットで、どこにでも持ち運べるようになっている。主なインターフェイスは、操縦者の腕の動きを伝えるマスターアーム、脚の動きを伝えるマスターフット、ロボットの視点を写す裸眼立体視ディスプレイの3点。
マスターアームは見ての通り、青い部分を握って動かすことで、ロボットが操作者の動きをトレースする。パトレイバーで泉野明がイングラムにあやとりを教えていたが、残念ながらあそこまで簡単にはいかないようで、動かすにはだいぶコツがいるように思われた。マスターアームの可動範囲に対してロボットの腕の可動範囲が小さくなるようセッティングされているらしく、腕を動かすためには何度もマスターアームを細かく操作していた。パソコンのマウスにたとえると、カーソルのスピードが遅く設定されていて、マウスを何度もマウスパッドの上で同じ方向に動かさなければいけないようなものか。確認し忘れたが、首の操作もマスターアームの指先に当たるスイッチで行なっていたように見えた。
足元を見ると、踵に青いリボンがついているだけだが、このリボンがすぐれもの。ただのリボンではなく中に導体がとおっていて、これ自体がセンサになっている。脚を動かすとリボンの曲がり方に変化が生じ、それによって脚の位置をかなり正確に検出できる。着座した後に脚の位置を修正していたが、このマスターフットによって微妙な調整がなされていた。
|
|
|
|
|
|
|
|
|
|
|
|
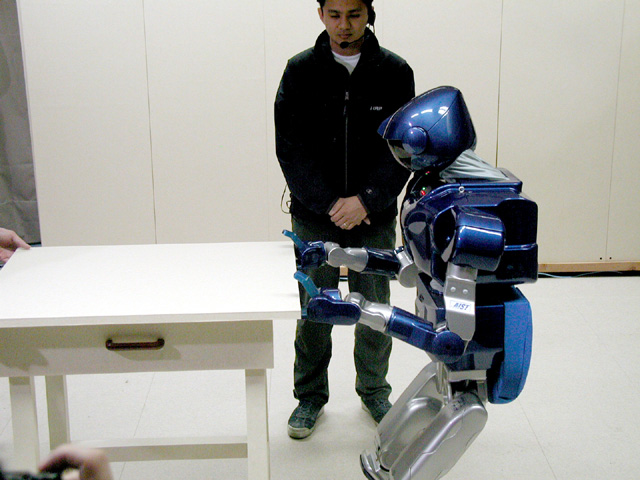
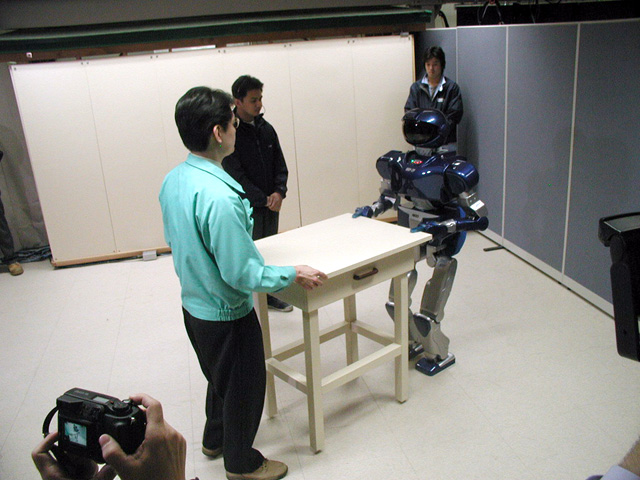
最後は人とロボットの共同作業。ROBODEX 2002でも実演した人と一緒に机を運ぶというデモを行なった。
HRP-2Pはまだ完成してから間もないためまだ多くの動きができるわけではないが、それでも3月の発表時には見られなかった、体操のように上半身を腰から左右にひねる動きをしていた。
ムービーで見るとわかるが、HRP-2Pの歩行時の体の揺れに対して、手の制振動作はまったく行なわれていないので、運んでいる机がかなり揺れている。机程度の重量なら相手の人間で十分カバーできるが、これがもっと重いものならそれも難しくなるだろう。素人目にはその辺が今後の課題に見えた。
机を運んだ後は、報道陣の前まで歩いてきて深々とお辞儀をし、デモは終了。なんか見たことあるなぁ、と思ったら川田工業のisamuも同じようなことをしていた。てことはこのパフォーマンスも川田の人がやらせたのかな?
お終いに出渕裕デザインになるHRP-2の成果機について。正確な時期は10月の予定だそうだ。またデザインも、現在のHRP-2Pにそのまま出渕裕のボディをかぶせた物になるのではなく、プロポーションなどもう少し見直して格好良くしたいと、比留川氏が言っていた。やっぱり気にしていたんだなぁ。これで秋の楽しみが一つ増えた。
|
|
|
|
■産総研 働く人間型ロボット
http://www.aist.go.jp/aist_j/press_release/pr20020410/pr20020410_0.html
■K.Moriyama's diary "HRP-2 Prototype & SDR-4X" Special(独断と偏見のSF&科学書評)
http://www.moriyama.com/diary/2002/HRP2&SDR-4X/HRP2&SDR-4X0319.htm